Posts tagged robotics
For my latest project, I've decided to make a tracked robot, cunningly named John. Tracks are really cool, and something I've not had on a robot before. Nice perhaps, but tedious to make, as hooking together 40+ segments of track with impossible to fasten pins makes for a pretty boring/annoying task..
Anyways, so far I have the chassis built, tracks built and motors in. He's looking cool so far, like the bottom of a mini Johnny 5 :)
The chassis is made from laser cut Lexan panels, with aluminium brackets. The tracks are heavy duty polypropylene and rubber, along with 7.2v 50:1 geared motors.
Obviously, at this stage, he does pretty much bugger all. In order for him to even move I've still got to fit a motor controller and a cpu, plus write all the inital movement routines. I intend to use a BASIC Stamp 2 for the brains at the moment, but will switch it over to the Propeller when I've got one.
Here be some initial pics:



And here's a picture of an airborne cat:

I had today off work so I thought I'd work on something for John which doesn't require drastic hardware changes (ie trying to mount sensors near the front of the tracks) so I have decided to pursue some remote control for John using an ancient NES pad:

This kind of pulls away somewhat from full robotics, whereby the robot does everything on its own with no human input. This will be fun however, and I might learn something - sounds good to me. The first steps I took were to establish how the NES pad works exactly. I already know a bit about this from where I was going to use the pad for another project ages ago. Anyways just for fun I took the pad apart, to be presented with just one IC! (gone are the days of simple electronics eh)

A rubbish picture I know, that's what you get for using a phone as a camera. Anyway that single IC is a 4021 shift register, a common device that takes parallel inputs and then can be commanded to shift each value out serially. This has a huge benefit, as in order to monitor 8 inputs (the NES has 8 buttons, A, B, Start, Select, Up, Down, Left Right) it would take a whopping 8 IO lines! The shift register effectively cuts this down to just three IO lines to be able to monitor all eight buttons. The downside is that it's relatively slow in the electronics world, but it's easily fast enough for occasional polling.
In order to operate the register, you must of course provide it power and ground from the logic supply, and then you should be concerned with three pins, LATCH, CLOCK and DATA. Basically the DATA line will contain 0 or 1 that indicates the state of the current button (where LOW indicates button pressed). In order to cycle through the buttons, the LATCH line must be held low, and then each successive HIGH pulse on the CLOCK line will shift the next bit out onto the DATA line. Once this is repeated 7 times (DATA always holds the first value - the first CLOCK moves onto bit 2) LATCH is set HIGH again and the chip resets back to bit 0 on the DATA line again. As I said above the controller has 8 buttons which is perfect for a shift register as it the total button state can be represented in exactly a byte.
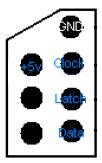
In order to verify this behaviour I setup a test circuit to work out which button appears at which point in the shift sequence. Thankfully I have a diagram that shows how the pins on the controller connector are mapped to the IC:
With that I knocked up a simple circuit that can be used to poll the state of the buttons. For this I have a LED on the DATA line to show the output, and the CLOCK and LATCH lines are hooked to ground through a push button. The resistors on these two lines are known as pull-up resistors, they basically always ensure that the line

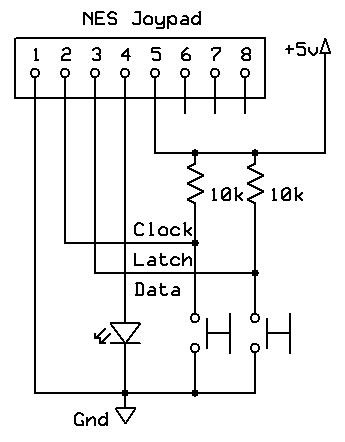
is HIGH by default and prevents any noise or "floating" inputs. When a button is pressed the line is pulled to LOW.
Now, bearing in mind that the DATA line will always show the output of bit 0 even when the latch is HIGH, I quickly determined that bit 0 was button A, as pressing A made the LED switch off. Now, whilst holding the LATCH button, pressing the CLOCK button cycled through the button states. I held down the different buttons on the pad and cycled through to establish the buttons states were in the following order:
0 - A
1 - B
2 - Select
3 - Start
4 - Up
5 - Down
6 - Left
7 - Right
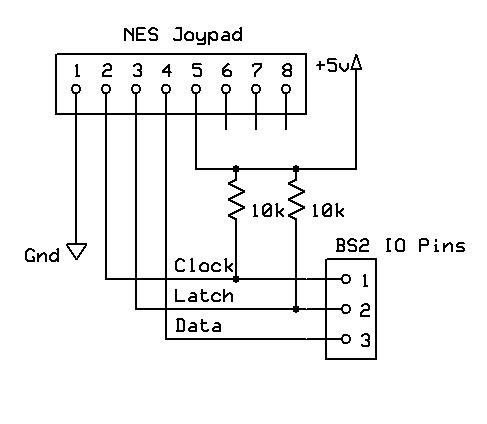
Nice! Phase two was to attempt to read this data in from the micro-controller (a basic STAMP 2). I modified the circuit so the DATA, LATCH and CLOCK lines were hooked up to BS2 instead of buttons / a LED.
The BS2 already has a nice function to read serial data in from external devices called SHIFTIN. This asks for a data and clock pin, and a variable with which to read the data into. Therefore the only thing I need to worry about is controlling the LATCH line which is very straightforward. I used the following simple program to read the button states in and display them in the debug terminal. Note that all inputs are HIGH by default and LOW when a button is pressed - this logic is a bit backward when coding so I XOR the result with 11111111 to produce a byte where a bit value of 1 means that button is pressed.
' {$STAMP BS2}
' {$PBASIC 2.5}
DAT PIN 3
CLOCK PIN 1
LATCH PIN 2
joyinput VAR Byte
Main:
'Attempt to r
ead the contents on the shift register in
LOW LATCH
SHIFTIN DAT, CLOCK, MSBPRE, [joyinput]
HIGH LATCH
'XOR the output to invert the bits
joyinput = joyinput ^ %11111111
'Show results
DEBUG BIN8 joyinput
PAUSE 100
GOTO Main
This worked very nicely, an example of output when button A and up are pressed is 10001000 as expected. I will be using the RF transmitter / receiver mentioned in a previous post to transmit this data to John for processing. Ideally I think I would have the NES circuit work out which direction to go and then send a nibble with a value in it indicating what's going on. This way it halves the amount of data being sent and eases up on some of the processing for John. For this test however I will just send the whole byte and have John do the processing.
What I want is for up / down to go forward and backward, left / right pivot left and right, and diagonal up/right up/left to turn right/left respectively. I'm not going to bother with backwards movement and turning for now. Button A will increase John's speed through Cautious, Cruise and Max, whilst button B does the reverse, and steps back through the speeds. Sending no movement commands will cause the movement to stop. For this to work properly certain states need a higher precedence, ie diagonally up/right should be checked before right on its own or up on its own, and if found then the others should not be checked. The other concern is that of the buttons - I'm sending radio pulses every 100ms, and when I press the button I want it to fire once and only once until I have let go of the button and pressed it again. One final precaution is to prevent any noise or rubbish data from suddenly making John do stuff I didn't ask - this is easily implemented by requiring two identical bytes to be recieved in sucession before acting on them.
All being said and done I now have a new version John's program that accepts a RF signal, then uses some bit masking to determine what the command was, which is then executed. I have also now added the output from the NES controller to be displayed across 8 of the LEDs in the development board. This is because the connection from the NES plug to the board is not very good (a few bits of wire), and can need some wiggling about when moved to get working properly. The LEDs act as real time debugging so I can see the circuit is working as it should be whilst away from the PC.
Full schematics for John as it stands, and the NES controller:

NES
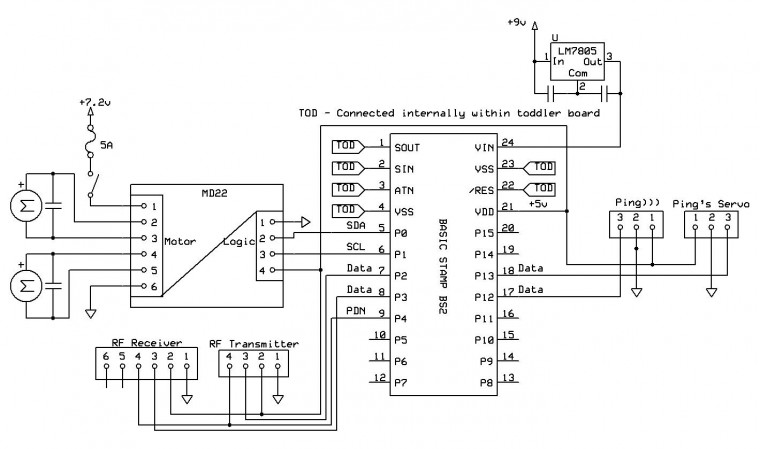
John
I will post a video at some point. Happy to report John is working remotely via the NES pad - very cool! A nice use for a poor pad that thought it would never be used again -worth the £1.50 it cost me from Gamestation :)
john_rf.doc (48.50 kb)
Right it's been a little while since my last post, but John is now alive and functional, albeit with some drawbacks for the moment. Here's a few pics I took a minute ago of John as he stands:

In this next one you can just about see the motor controller board - it's sitting on the lower level


The brain is that of a BASIC STAMP 2 from Parallax (which is actually a PIC with some extra hardware to provide a easier interface to program), I'm using the board from my Toddler robot as I only have two stamps, and the other one is in my development board. The toddler board is great because it has a surface mount BS2, a prototype area (breadboard), several servo connections mapped internally to the stamp's IO pins, a reset button, three way power switch allowing you to not provide power to the servo connectors, and a programming connector (serial cable - rs232) all on one small board. Unfortunately the toddler takes a +6v supply which is then regulated to 5v within the stamp itself, leaving both +6v and +5v on different headers. Usually the 6v comes from the 3xAA battery holder in the toddler, I don't want to use that though so for now I've got my own 5v regulator on the toddler board which feeds the stamp from a 9v battery. I have a couple of cheap re
mote control monster trucks that use a 6v source, and they have a battery pack and recharger, so I will be chopping one of those out to use soon. It's all about the rechargeable battery packs.
The motors themselves are powered by a 7.2v Ni-Cd battery at 1800mA through a very nice dual H-Bridge, which I bought this time rather than making my own. Its a M22 made by Devantech, a English manufacturer, and it's got a whole bunch of nice features. You can't really see it in those pics above so here's a picture of it:
 <-- rawr!
<-- rawr!
This can take motors that require up to 50v and up to 5A per motor without a heat sink. Fine for John's requirements. It is capable of multiple different modes of operation, including straight analog control over each motor, RC mode which allows the motors to act like servos ( speed set by pulses at
different frequencies) or I2C mode which uses the popular Phillips I2C p
rotocol for complete programmatic control over every aspect of the motors, which is what I will be using for John. I will be adding some more I2C devices later as well.
The biggest benefit using DC motors rather than servos is that once you tell the motors to do something, they go off and do it until you tell them to stop - servos require the same pulse frequency to be sent every certain time period, usually about 25ms. This makes coding more tricky when the project is quite advanced, as you have to make sure the pulses are sent around all the other processing that's happening. Great fun with you have 4+ servos. Using motors frees up the code to do other things all the time, which can only be good! You can however buy or make a dedicated servo controller board (co-processor) which frees up this restraint in the same way. I will be using a servo controller board when I get a robotic arm for John.
Next up is sensors - for the time being John just has one sensor, which is an ultrasonic range finder capable of finding distances up to 3 meters, and it uses just one IO pin! You can see it in the pictures, it looks like John's "eyes". The Ping))) works on the same principal as a sonar - an ultrasonic pulse is transmitted, and the distance is measured by timing how long it takes to echo back. I have this mounted on a standard hobby servo, capable of 180 degree rotation, allowing the "eyes" to point in different directions and take distance readings.
 <-- echo, echo, echo!
<-- echo, echo, echo!
One of John's biggest problem at the moment is being able to see in front of the actual tracks - finding walls and objects straight ahead is one thing, but it doesn't cover an area wide enough in front of John for all situations. This job is well suited to infrared sensors or "whisker" type application, however it's going to be tricky to get anything mounted down there, but will be necessary soon.
You might have noticed the two antenna sticking up in the air - these are radio frequency transmitter and receiver modules, and will be used for communications across the airwaves to other circuits - they aren't currently being used in John but they are hooked up and ready - just need to be coded and have something to talk to.
<-- bad boys
That's about it at the moment for hardware. Currently have a simple program which tests all the systems, which allows John to roam around a bit, and when detecting a wall at 30cm he will pivot right until they way is clear to move forward. It's not very impressive but more a framework of lower level routines to get all the systems running, ie I2C communications and Ping))) distance acquisition. The motors themselves are capable of some quite high speed and torque, however for inside testing use I have him set to "caution" speed, otherwise I have to dive around the house trying to catch him before any disaster strikes. The torque is indeed quite powerful, John easily drives straight over anything that gets in his way, which can result in toppling over backwards and wrecking all the electronics (as almost happened this morning whilst driving over the N64 with Goldeneye in it). This can be avoided by fitting an accelerometer which measures tilt - I have one lying around somewhere that I might fit and try out.
One of the things I like most about the tracks is the ability to almost pivot on the spot - it can often be difficult to turn around without hitting other stuff but this does it really well.
I have attached the program I'm currently using. It's wrote in PBASIC and isn't the most efficient at the moment. PBASIC has several limitations such as having no subroutines/functions (GOSUB and GOTO for the win) and GOSUB will only nest 4 levels which can make it difficult to re-use a lot of the code. Another limitation with the STAMP is that it doesn't have a great deal of RAM to play with - in this example I'm already using a chunk:

In order to minimize memory usage, I will need to share variables where possible which can be tricky if you're not careful, not to mention making reading the code much harder to follow. I will be using basic subsumption architecture (fancy state machine) which will allow different movement patterns to be stored in the EEPROM and free up some space.
That's it for now, next up I will be looking at either getting some sensors in front of the tracks and in the centre lower down, or RF communication with the PC. I also have a ancient NES pad which I might hack and use it to remote-control john using another circuit and RF communications. I will also be designing a state machine and will have a lot of code to write ! Nex time I post I will upload a video and the schematics too (yay!)
john_basic.doc (42.50 kb)